1. Pagrindinė paskirtis ir taikymo sritis
0243368} WLB-10KN elektroninis traukiklis naudoja servo valdymo sistemą, gali užtikrinti vienodą poslinkio apkrovą ir vienodą jėgos apkrovą dviem pakrovimo režimais, dideliu efektyvumu ir geru stabilumu. Naudojant dvigubą jutiklio funkciją, matavimo diapazonas yra platesnis, tikslumas didesnis, o naudojimas yra lankstesnis ir patogesnis. Jutiklinio ekrano valdymas, žmogaus ir mašinos valdymo sąsaja yra draugiška. Braižybos priemonė turi teigiamos ir neigiamos jėgos vertės judėjimo ribą ir apsaugos nuo perkrovos funkciją, kuri gali užkirsti kelią įrangos pažeidimams dėl netinkamo veikimo.
0243368} Tinka sauso mišraus skiedinio, izoliacinės medžiagos, keraminių sienų ir grindų plytelių klijų, laminuotų statybinių dažų ir glaisto, naudojamų pastato išorės sienoms, tempimo ir sukibimo stiprumo bandymams. Jis atitinka įvairių statybinių medžiagų sukibimo stiprumo bandymą, nurodytą JC/T547-2005, GB/T9779-2005, JG/T157-2004.
Pagrindinės savybės:
0243368} 1) Jutiklinio ekrano valdymas, patogi sąsaja.
0243368} 2) Servo pavara, nuolatinė vienodo poslinkio apkrova ir vienoda jėgos apkrova.
3) Su dviejų jutiklių funkcija standartinė konfigūracija yra vienas jutiklis.
0243368} 4) Greitas kėlimas ir vieno mygtuko automatinio grąžinimo funkcija, kai nėra krovinio.
0243368} 5) Eigos ribos ir teigiamos bei neigiamos jėgos vertės apsaugos nuo perkrovos funkcija.
0243368} 6) Greitas padėties nustatymas X-Y kryptimi, ypač tinkamas aptikti kelis mėginius ant bandymo plokštelės.
0243368} 7) Įrengtas vieno taško spaustukas, patogus tirti vieną mėginį.
0243368} 8) Jungtinė T formos kortelės galvutė, palengvinanti mėginių padėties nustatymą ir įkėlimą.
0243368} 9) Judantis presas, kad būtų išvengta bandomosios medžiagos lenkimo ir deformacijos. (nestandartinis)
2. Pagrindiniai techniniai rodikliai
0243368} 1) Didžiausia eksperimentinė jėga: 10000N
0243368} 2) Apkrovos skiriamoji geba: 0,1 N
0243368} 3) Efektyvus aptikimo diapazonas: 1–100 % didžiausios eksperimentinės jėgos
0243368} 4) Apkrovos matavimo tikslumas: ±0,5 % nuo nurodytos vertės
0243368} 5) Brėžinio metodas: jėgos vertės valdymas, poslinkio valdymas ir kiti valdymo metodai
0243368} 6) Piešimo greičio diapazonas: 0,1–300 mm /min
7) Mėginio pločio diapazonas: 70–500 mm
8) Didžiausias bandinio storis: 50 mm
0243368} 9) Didžiausias bandymo galvutės eiga: 100 mm
3. Darbo aplinkos sąlygos
3.1 Kambario temperatūros diapazone 100C ~ 350C santykinė oro drėgmė ne didesnė kaip 80%;
0243368} 3.2 Teisingai sumontuokite ant tvirto pagrindo arba darbastalio, kurio lygis yra 0,2/1000;
3.3 Aplinkoje be vibracijos, korozinių terpių ir stiprių elektromagnetinio lauko trukdžių;
3.4 Maitinimo įtampos svyravimų diapazonas neturi viršyti ±10% vardinės įtampos.
4. Pagrindinė struktūra
4.1 Maitinimo šaltinių prijungimas
0243368} Kaip parodyta paveikslėlyje, į maitinimo prievadą įkiškite atsitiktinį maitinimo šaltinį, įjunkite priekinį maitinimo mygtuką ir jutiklio laidas bus prijungtas prieš pristatymą.

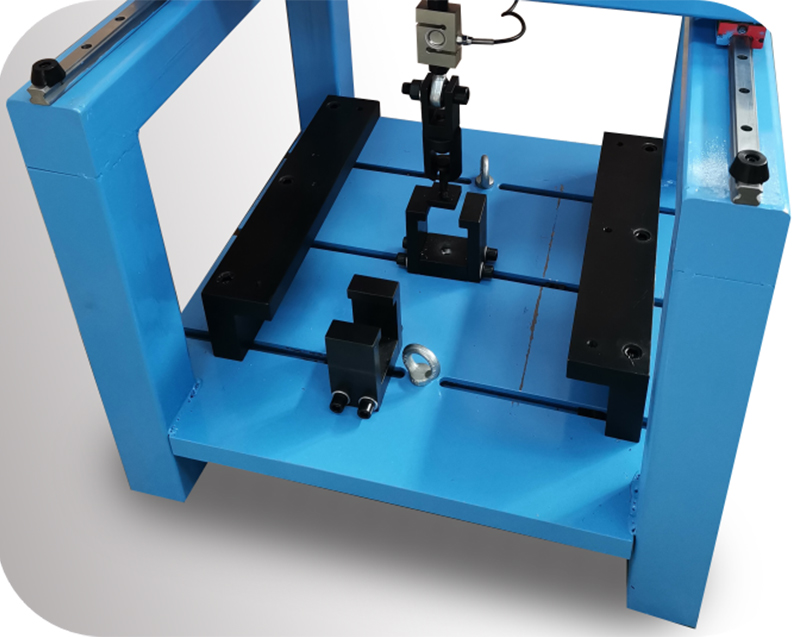
4.2 Eksperimentinės padėties koregavimas
0243368} Kaip parodyta aukščiau esančiame paveikslėlyje, atsižvelgdami į bandymo blokų skaičių, galite sumontuoti vieno taško tempimo įtaisą (atsitiktinai su 10 vienetų), fiksuoti armatūros padėtį ir rankiniu būdu reguliuoti traukimo galvutės padėtį. , bandomasis, tempiamas griebtuvas yra sferinis universalus, gali būti automatiškai išlyginamas, tinka įvairioms dėjimo pozicijoms.
0243368} Dešiniajame įrenginio gale yra mygtukas [maitinimo jungiklis], skirtas įjungti arba išjungti įrenginį ir išorinę maitinimo dangtelio plokštę, raudona [avarinio stabdymo jungiklis], žalia [maitinimo indikatorius].
0243368} Išjungę pagrindinį kompiuterį pasukite [maitinimo jungiklio] mygtuką, sistema bus įjungta ir užsidegs žalia [maitinimo indikatoriaus] lemputė. Įrenginys gali veikti.
0243368} Avariniu atveju paspauskite raudoną [avarinio sustabdymo jungiklį], kad išjungtumėte pagrindinio kompiuterio maitinimą.
5. Montavimas ir reguliavimas
0243368} 5.1 Išimkite įrangą iš pakuotės ir patikrinkite, ar transportavimo metu nėra susidūrimo ar pažeidimų.
0243368} 5.2 Padėkite įrangą ant tvirtos platformos arba cementinės platformos ir sureguliuokite lygį taip, kad ji būtų horizontalioje padėtyje (lygis 0,2/1000);
5.3 Maitinimo sistema turi būti 220VAC±10%/50Hz ir turi turėti patikimas įžeminimo priemones.
6. Naudojimas ir veikimas
6.1 Paruošimas:
0243368} 6.1.1 Tinkamai prijunkite visus įrenginio laidus ir įjunkite.
6.1.2 Įkaitinkite 5 min;
0243368} 6.1.3 Išvalykite bandymo jėgos rodymo langą iki nulio.
0243368} 6.2 Skirtingų specifikacijų pavyzdžiams pakeiskite skirtingus šviestuvus.
0243368} 6.3 Įvadas ir kiekvieno veikimo mygtuko aprašymas rodomas įrenginio ekrane
0243368} Veikimo sąsajos schema (toliau nurodyta):

6.3.1 Veido klavišo funkcijos:
0243368} Skystųjų kristalų ekranas: rodoma jėgos vertė, didžiausias poslinkis, greitis, raginimas, bandymo kreivė ir kt.
0243368} LCD ekranas yra jutiklinis ekranas, o visas testo funkcijas galima atlikti paspaudus tekstą arba paveikslėlį LCD ekrane.
6.3.2 Išsami informacija:
0243368} Toliau išsamiai aprašomas kiekvieno ekrano vaizdas ir funkcija, kartu su mygtukų naudojimu.

0243368} Tai ekranas, įvestas tiesiai po įkrovos, spustelėjus ekraną arba spustelėjus bet kurį klavišą. Rodomas kitas ekranas, kaip parodyta 2 paveiksle:

0243368} 2 paveiksle prieš „tempimo bandymą“ yra *, nurodantis, kad šiuo metu pasirinktas bandymo metodas yra tempimo bandymas.
0243368} Spustelėjus bet kurią eilutę ekrane rodoma, kad pasirinktas atitinkamas tyrimo metodas. Bandymo metodui pasirinkti taip pat galima naudoti klaviatūros klavišą
.
0243368} Daroma prielaida, kad pasirinktas „tempimo testas“, ekrane spustelėkite Gerai arba paspauskite mygtuką , kad patektumėte į kitą puslapį, kaip parodyta 3 paveiksle:

0243368} 3 paveiksle parodytame paveikslėlyje spustelėkite „Test“ arba paspauskite klavišą , kad pradėtumėte tempimo bandymo procesą ir automatiškai baigtumėte pagal nustatytas sąlygas. Spustelėkite jėgos langelį, deformacijos langelį ir poslinkio langelį, kad išvalytumėte vykdymo jėgą, deformaciją ir poslinkį. Paspauskite mygtuką „Išvalyti“, kad išvalytumėte jėgą, deformaciją ir poslinkį vienu metu. Spustelėkite "Užklausa", norėdami užklausti bandymo rezultatus, paspauskite klavišą taip pat galite užklausti bandymo rezultatus. Spustelėkite „Reguliavimas“, kad būtų rodomas 4 paveikslo ekranas ir galite reguliuoti sijos apkabos spaustuko padėtį.

0243368} 4 paveiksle spustelėkite „pagreitinti“ ir „sumažinti greitį“, kad pakeistumėte greitį, o mygtukai ir taip pat gali pakeisti greitį.
0243368} Grįžkite į 3 paveikslą, spustelėkite Nustatymai viršutiniame kairiajame ekrano kampe arba paspauskite , kad perjungtumėte į ekraną į 5 paveikslą:

0243368} 5 paveiksle spustelėkite „Test Metod Selection“, kad persijungtumėte į ekraną, kaip parodyta 2 paveiksle.
0243368} Grįžkite į 5 paveikslą, spustelėkite „Sistemos kalibravimas“ ir paraginkite įvesti slaptažodį, kaip parodyta 6 paveiksle:

0243368} Įveskite slaptažodį 111 ir spustelėkite Gerai, kad įvestumėte 7 pav.:
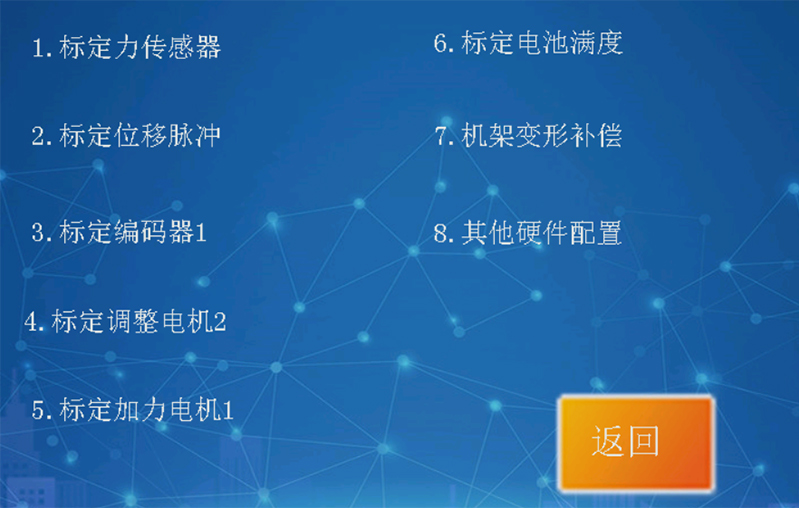
Trys parametrai: jėga, poslinkis, greitis prieš naudojimą turi būti sukalibruoti, kitaip netikslūs.
0243368} Tarp šių trijų parametrų kalibravimo seka pirmiausia turėtų būti poslinkis, tada greitis ir galiausiai jėga.
0243368} Dvi sąvokos: poslinkis ir deformacija.
0243368} Poslinkis – tai, kiek pasislenka bandomasis spindulys.
0243368} Deformacija – tai bandinio deformacija po įtempimo, o deformaciją galima išmatuoti specialiu ekstenzometru arba poslinkiu. Kaip pavyzdį imant suspaustas standžias putas, viršutinei įdubai judant žemyn, poslinkis toliau didėja, o deformacija yra lygi nuliui prieš kontaktą su bandiniu; po kontakto su bandiniu deformacija didėja ir poslinkis taip pat didėja, o bendras poslinkis atėmus tuščią eigą prieš kontaktą su bandiniu yra deformacija. Tai yra pagrindinis deformacijos matavimo poslinkiu principas.
0243368} Pagrindinė valdymo plokštė palaiko tris impulsų įvesties kanalus, būtent 0 impulsą, 1 impulsą, 2 impulsą.
0243368} Impulsas 0 yra prijungtas prie variklio išvesties impulso plokštėje, žingsniniam varikliui arba kintamosios srovės servo varikliui yra variklio pavaros impulsas, impulsas 0 skaičiuojamas, impulsas 0 atspindi variklio sukimosi žingsnių skaičių, variklio sukimasis skatina spindulį judėti, impulsas 0 yra proporcingas poslinkiui.
0243368} Impulsas 1 ir impulsas 2 yra pilnos stačiakampio kodavimo sąsajos su išoriniais kaiščių įėjimais.
0243368} Spustelėkite „Kalibravimo poslinkio impulsas“, kad būtų rodomas 8 paveikslas:

0243368} Norint išmatuoti poslinkį, reikalinga liniuotė arba ciferblato indikatorius.
0243368} Įveskite bet kokį greitį (kai greitis netikslus ir nereikalingas), variklis pakyla arba nukrenta, kad užvestų variklį, liniuotę imkite kaip standartą, leiskite pluoštui judėti tam tikru atstumu, pvz., 20 mm, peržiūrėti išmatuotą impulso skaičius, darant prielaidą, kad 2400, tada standartinis ilgis užpildomas 20, atitinkamas impulso skaičius įrašomas 2400, spustelėkite išsaugoti, poslinkio kalibravimas yra baigtas.
1 kodavimo ir 2 kodavimo įrenginio kalibravimas yra panašus ir daugiau nebus aprašomas.
0243368} Spustelėkite „Kalibravimo greitis“ 7 paveiksle, kad būtų rodoma, kaip parodyta 9 paveiksle:
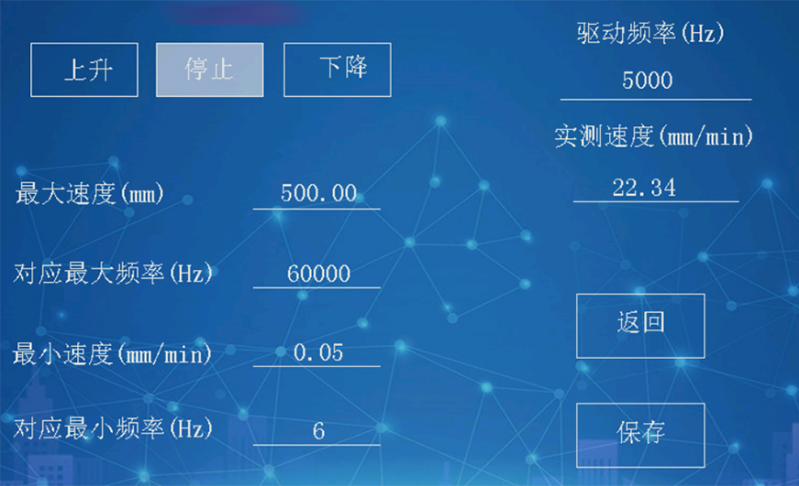
0243368} 9 paveiksle įveskite bet kokį pavaros dažnį, pvz., 10 000, spustelėkite aukštyn arba žemyn ir po trijų sekundžių patikrinkite išmatuotą greitį. Jei išmatuotas greitis yra mažesnis už didžiausią įrenginio reikalaujamą greitį, pakeiskite pavaros dažnį ir bandykite dar kartą, kol išmatuotas greitis bus didesnis už didžiausią įrenginio reikalaujamą greitį. Tarkime, kad išmatuotas greitis yra 504, kai pavaros dažnis yra 64 000.
0243368} Tada sustokite, įveskite keturis skaičius kairėje, maksimalus greitis yra 504, atitinkantis maksimalų dažnį yra 64 000, minimalus greitis yra 0,05 (0,05 yra 504 padalintas iš 10 000), atitinkamas minimalus dažnis yra 6 ( 6 yra 64 000, padalintas iš 10 000). Greičio santykis skaičiuojamas 1:10 000.
0243368} Spustelėkite „Jėgos jutiklio kalibravimas“ 7 paveiksle, kuris rodomas kaip parodyta 10 paveiksle:

0243368} 10 paveiksle paruoškite standartinį dinamometrą, pirmiausia užpildykite kiekvieno taško jėgą pagal jėgos jutiklio matavimo diapazoną, darant prielaidą, kad jutiklio matavimo diapazonas yra 500 N, tada jėgos taškai gali būti 10, 20, 50, 100, 200 500 , turi užtikrinti, kad jėgos būtų išdėstytos didėjančia galia, o šeštoji jėga yra matavimo diapazonas jutiklis. Kai jutiklis nėra apkrautas, spustelėkite , kad išvalytumėte. Padidinkite jėgą, patikrinkite standartinį dinamometrą, kai jėga pasiekia tašką, ekrane spauskite "fiksuoti", kai užfiksuoti šeši jėgos taškai, spustelėkite "Išsaugoti".
0243368} 7 paveiksle spustelėkite „Kalibruoti kitus jėgos jutiklius“, kad būtų rodoma, kaip parodyta 11 paveiksle:

0243368} Mašina gali palaikyti dar 3 keičiamos formos jėgos jutiklius, o kalibravimo metodas panašus į pirmojo jėgos jutiklio, todėl jis daugiau nebus aprašomas.
0243368} Spustelėkite „Help“ 5 paveiksle ir bus rodomas pagalbos ekranas, daugiausia kiekvieno ryšio apibrėžimas.
0243368} 2 paveiksle pasirinkite bandymo metodą ir spustelėkite „Nustatyti“, kad patektumėte į bandymo metodo parametrų nustatymo puslapį.
0243368} Šie parametrai vadinami sąrankos parametrais, o parametrai, aprašyti ankstesniame kalibravime, vadinami kalibravimo parametrais.
Kalibravimo parametrus nustato gamykla, kad nustatytų prietaiso tikslumą, o vartotojas negali jo keisti savo nuožiūra, todėl jis yra apsaugotas slaptažodžiu. Nustatymų parametrus vartotojas gali keisti pagal naudojimą. Šie parametrai neturi įtakos prietaiso tikslumui. Nereikia slaptažodžio.
0243368} Toliau pateikiamas tempimo bandymo pavyzdys. Tempimo bandymo nustatymo parametrai parodyti 12–19 pav.

12 pav
13 pav
14 pav
15 pav
16 pav
17 pav
18 pav
19 pav
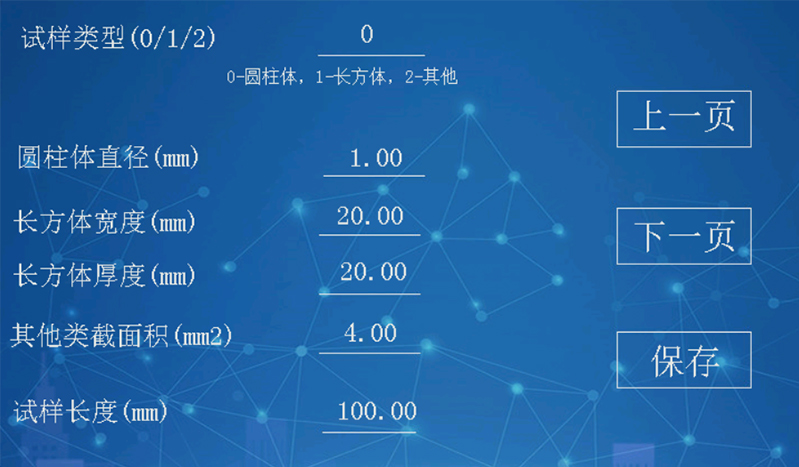
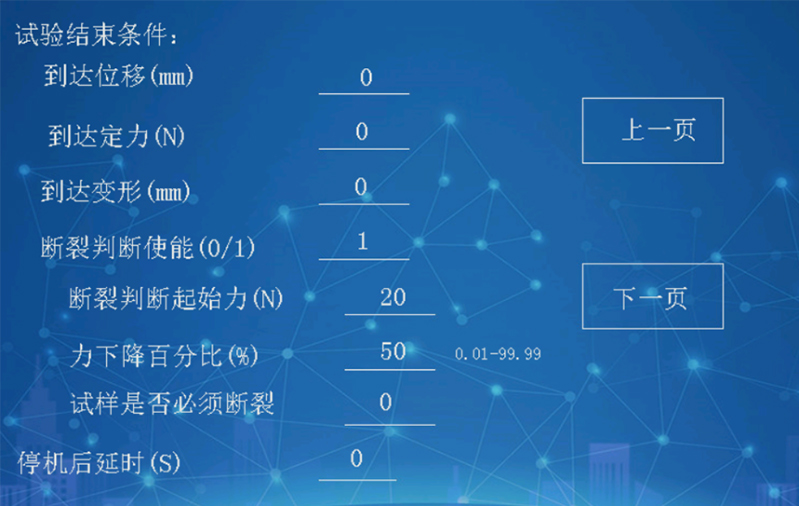
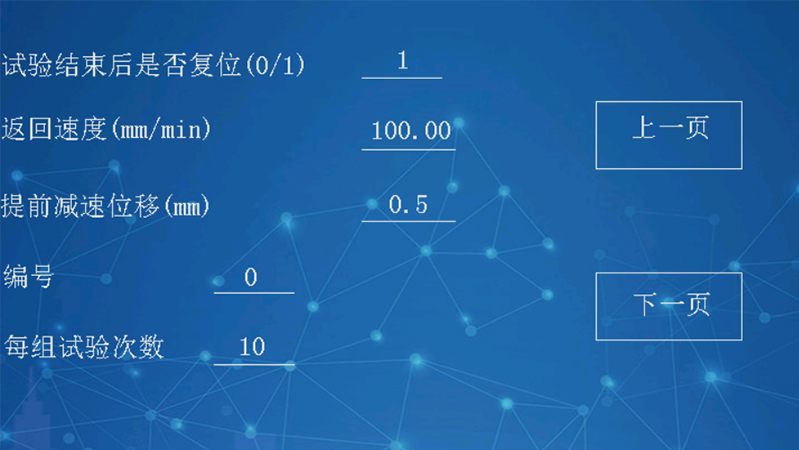
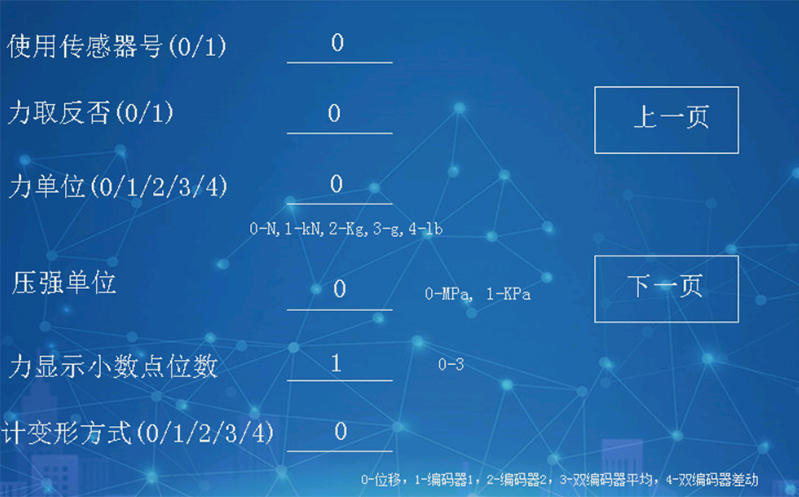
Nuo 12 pav. iki 19 pav. nustatomi parametrai, kurie aprašomi taip:
0243368} Mėginio tipas suskirstytas į tris tipus. Jei mėginio tipas yra 0, skersmens parametras galioja ir sistema automatiškai apskaičiuos skerspjūvio plotą pagal skersmenį
0243368} Jei mėginio tipas yra 1, galioja pločio ir storio parametrai, o sistema automatiškai apskaičiuos skerspjūvio plotą pagal plotį ir storį.
0243368} Jei imties tipas yra 2, galioja kitų tipų skerspjūvio plotas.
0243368} Jėga, padalyta iš skerspjūvio ploto, yra lygi stiprumui. Tinkamas skerspjūvio plotas ir tinkamas stiprumas.
0243368} Mėginio ilgis naudojamas pailgėjimui apskaičiuoti.
0243368} Tamprumo moduliui apskaičiuoti naudojami apatiniai ir aukščiausi tamprumo segmento taškai (žr. GB/T228-2010). Du verti konkretūs dydžiai yra susiję su imtimi. Apskritai žemiausias taškas turėtų būti nustatytas maždaug 15 % didžiausios jėgos, o aukščiausias taškas – maždaug 30 % didžiausios jėgos, todėl prieš bandymą reikia įvertinti didžiausią jėgos vertę. Nustatykite šiuos du taškus pagal numatomą didžiausią jėgą. (Kompiuterio programinė įranga gali įrašyti visą bandymo procesą, nereikia įvertinti)
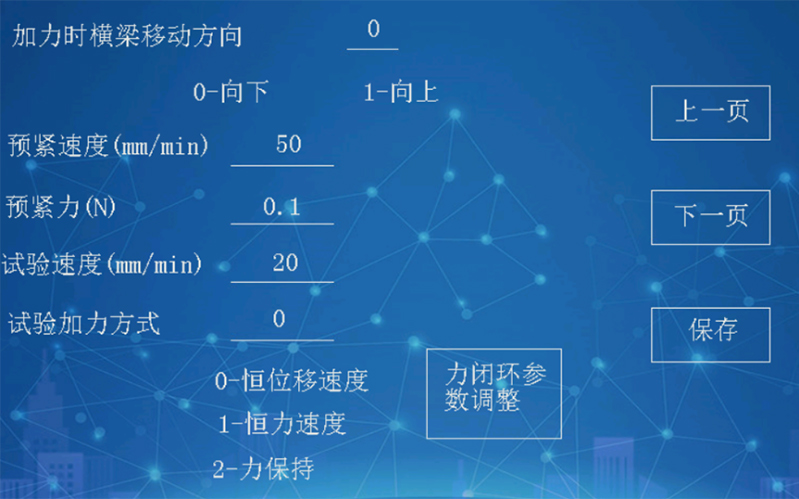
0243368} Vėlesnės jėgos judėjimo kryptis 0 – žemyn, 1 – aukštyn
0243368} Pradėti poslinkio greitį, jei jėgos taikymo būdas yra pastovus poslinkio greitis, tai čia yra bandymo greitis.
0243368} Jei įtempimo jėga nustatyta į 50 N, tai reiškia, kad pavyzdys tampa tiesus, kai jėga yra 50 N, o deformacijos skaičiavimo pradinis taškas pagal numatytuosius nustatymus yra 0,1 N
0243368} Jėgos režimas: pastovus poslinkio greitis, žingsninis variklis ir kintamosios srovės servo variklis gali užtikrinti numatytąjį jėgos režimą.
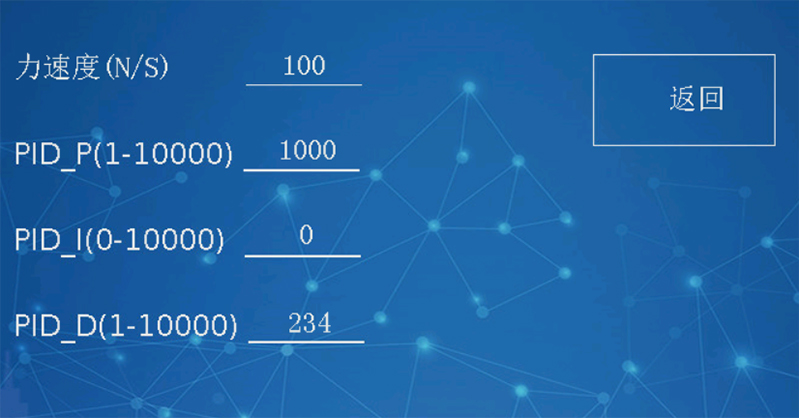
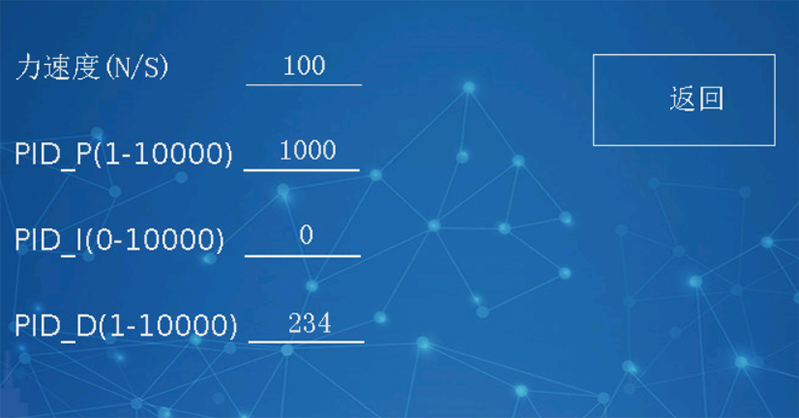
0243368} Nuolatinis jėgos greitis, tokiu būdu reikia naudoti jėgos grįžtamąjį ryšį, taip pat žinomą kaip jėgos uždaro ciklo algoritmas, yra įvairių jėgos uždarojo ciklo algoritmų, čia yra PID algoritmo naudojimas, reikia nustatyti PID parametrus iš anksto. Atitinkamų PID parametrų nustatymo procesas vadinamas PID parametrų derinimu.
0243368} Spustelėkite [Force closed loop parameter Adjustment] 14 paveiksle, kad būtų rodomas 20 paveikslas
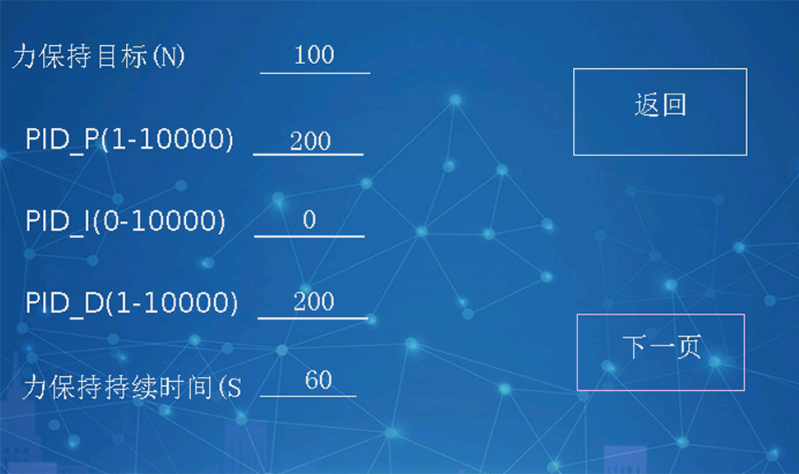
0243368} Pastovios jėgos priežiūrai taip pat naudojamas PID algoritmas, kaip parodyta 21 paveiksle
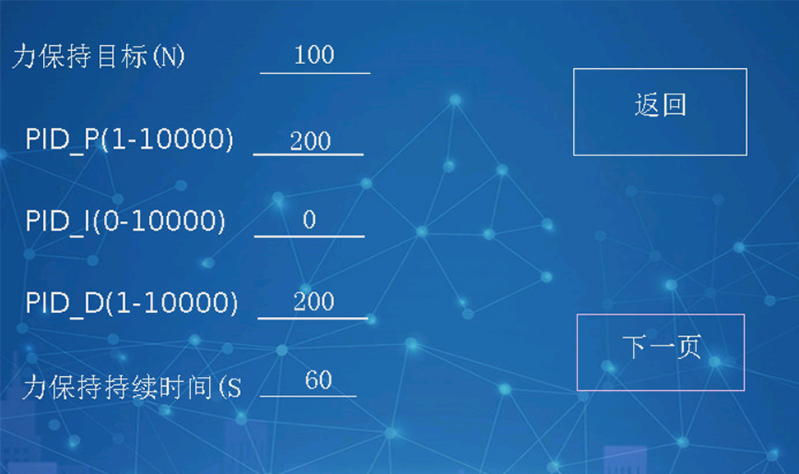
0243368} Pastaba: Atliekant tempimo bandymą, pastovios jėgos išlaikymo metodas neveikia, tik atliekant jėgos išlaikymo bandymą.
7. Atsargumo priemonės
0243368} 7.1 Prieš paleisdami sistemą pirmą kartą patikrinkite kabelių ir įvesties maitinimo tikslumą. Maitinimas yra 220V±50Hz ir tinkamai įžemintas.
7.2 Prieš atlikdami testą, teisingai nustatykite testo parametrus, kad užtikrintumėte testo duomenų tikslumą.
0243368} 7.3 Bandymo metu atlikite testą pagal teisingą metodą.
8. Dažni gedimai ir trikčių šalinimas
| Todėl išvaizda užblokuota |
Priežastis ir gydymas |
| Įjungus įrenginį ekranas nerodomas |
Valdiklio maitinimo laidas, sauga, jungiklis ir kt. |
| Nepradėkite jokių veiksmų |
Pagrindinis maitinimo šaltinis, sauga, jungiklis, valdymo kabelis |
| Po pakrovimo bandymo jėga nerodoma |
Jutiklis tinkamai prijungtas |
| Jėgos stabilumas |
Patikrinkite sistemos įžeminimo laidus |
| Ilgas garsinis signalas |
Jutiklis perkrautas arba nutrūkusi jutiklio linija |

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese
































